探索新的可能性
全球办事处
加拿大安大略省滑铁卢总部+1 (877) 634-6340info@ndigital.com
德国拉多尔夫采尔+49 7732 8234 0info@ndieurope.com
美国佛蒙特州谢尔本+1 (802) 985-1114info@ndigital.com
中国香港+(852) 2802-2205apinfo@ndigital.com
Polaris 光学跟踪
Aurora 电磁跟踪
3D Guidance 电磁跟踪
OEM 应用程序
开发
资源
随着介入肿瘤学向更精准、微创的经皮路径发展,OEM 正在集成电磁跟踪,以在无法建立视线(line of sight)的软组织解剖结构内实现器械定位。NDI 的 Aurora EM 跟踪可提供连续、实时的位置与姿态数据,支持肿瘤消融、影像融合以及多探针协同等高级导航工作流。
Aurora 提供实时定位层,将术前 CT 或 MRI 影像、超声可视化与体内器械的连续跟踪连接到 OEM 集成的介入肿瘤学工作流中。
Aurora EM 跟踪通过持续跟踪超声探头的位置与姿态,支持 OEM 超声平台构建 3D 超声体数据。该空间数据使系统能够将一系列 2D 超声扫查重建为体积图像,支持 OEM 集成工作流中的解剖可视化与术前规划。
Aurora 可为消融探针、活检针及其他器械提供相对于 CT 或 MRI 派生解剖结构的连续位置数据。当仅靠影像无法在软组织内持续呈现器械位置时,EM 跟踪可在整个手术过程中为器械相对靶点提供实时定位数据。
Aurora 提供实时空间数据,OEM 平台可利用该数据对术前 CT 或 MRI 数据集与实时超声影像进行配准并维持对齐。这支持在同一显示界面上实现多种影像模态的联合可视化,使 OEM 能够设计兼顾 CT/MRI 分辨率与超声实时能力的系统。
免责声明:本证言反映了包含 NDI 跟踪组件的 OEM 导航系统的使用体验。临床结果取决于 OEM 系统设计、用户培训与临床方案。NDI 跟踪组件本身并非独立用于改善临床安全结果。
“使用导航系统所增加的时间投入,会在后续更安全地完成介入操作中得到回报。借助导航进行安全规划所花的时间非常有价值,而且远远少于在出现问题时所浪费的时间。”
Dr. Michael Höpfner胃肠科医生 & 导航专家
Aurora 可集成至 OEM 介入肿瘤学系统,为消融、活检与影像融合工作流提供实时器械定位。
采用 EM 跟踪的超声探头可用于支持 CT 或 MRI 与实时超声的融合,并可实现由 OEM 定义的 3D 图像重建能力
与 OEM 影像系统配合时,采用 EM 跟踪的活检与消融针可用于提供针尖位置与轨迹数据
在 OEM 系统中,采用 EM 跟踪的配准探针可用于采集轨迹规划与配准工作流所需的位置数据。
在 OEM 系统中,采用 EM 跟踪的参考传感器可在影像融合工作流中用作位置参考
代表性 OEM 设备 所示示例仅代表常见的 OEM 集成,并非完整列表。
面向一次性器械的低成本 5DOF 跟踪而设计。PCB 版本支持直接集成到 OEM 影像推车中。
可安装于床旁、OEM 超声推车或独立支架上,并可在需要时推入/推出手术区域。更大的跟踪体积,适用于更广的跟踪空间。
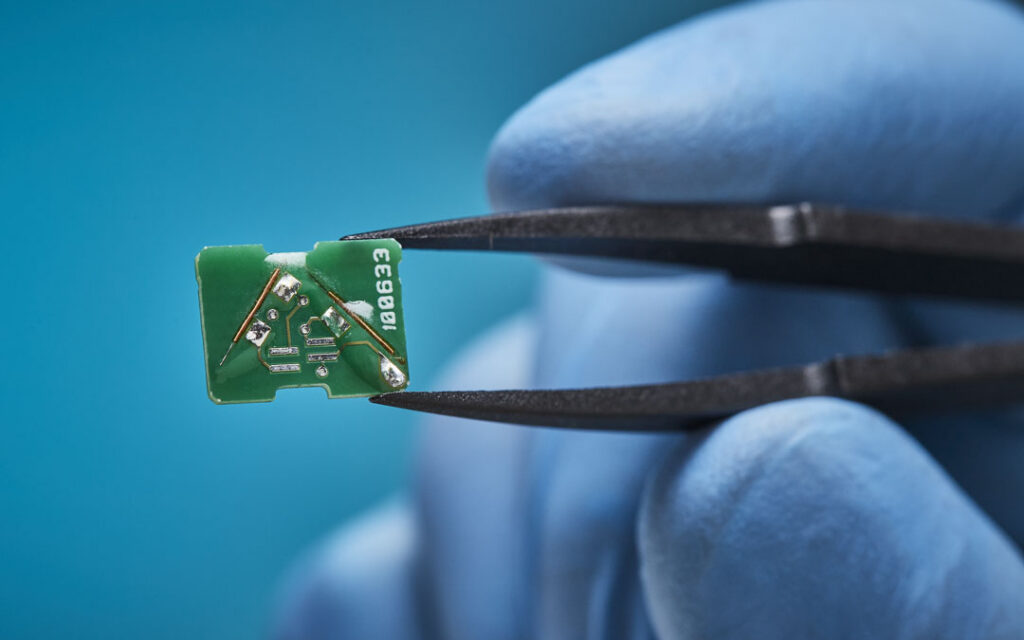
超声探头传感器
热门选择:6DOF PCB 传感器
超声探头通常可容纳更大的传感器(如 PCB 传感器),从而获得更高的精度。
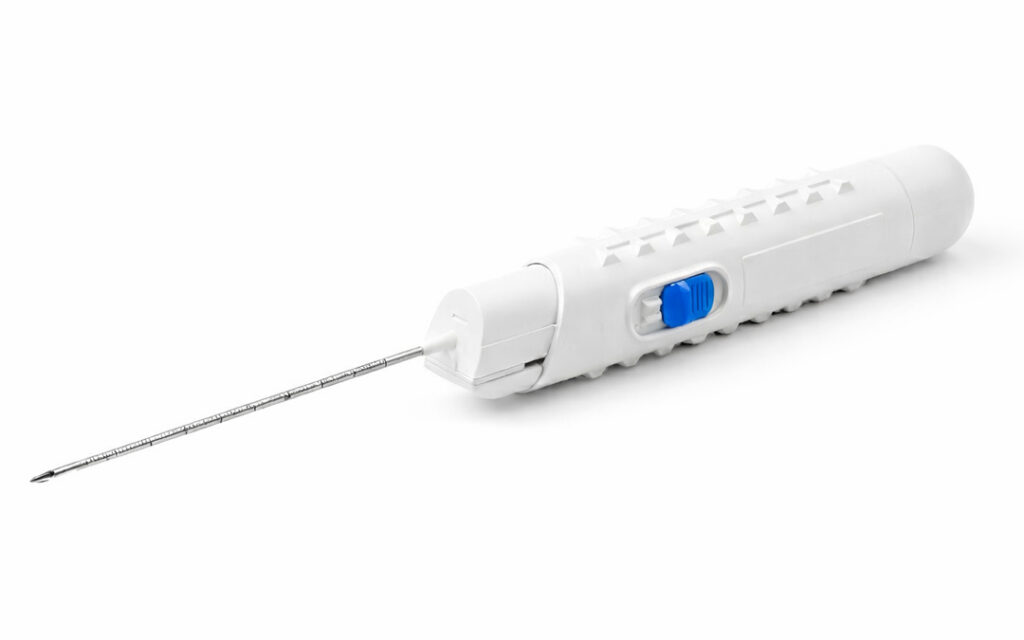
消融/活检针传感器
热门选择:5DOF 实心传感器
在一次性穿刺针工作流中,小尺寸、低成本传感器至关重要。5DOF 可提供目前最小尺寸的传感器。
通用适配器传感器
热门选择:5DOF/6DOF PCB 传感器
稳健的传感器,适用于夹持式器械,若需要可确保重复使用。
患者参考传感器
热门选择:PCB 传感器
提供更强信号,以实现一致、可靠的影像融合。
正在开发影像引导的介入肿瘤学系统?
欢迎与我们的产品集成团队联系,共同确定适用于您的消融、影像融合或经皮导航平台的 Aurora 跟踪配置方案。
介入肿瘤学操作往往针对体积小、位于腹部或胸腔脏器深部的肿瘤,周围临近关键结构,并且会受到呼吸运动影响。CT 与超声等影像模态可提供重要的解剖学信息,但各自存在局限:CT 分辨率高,但实时引导能力有限;超声可持续可视化,但分辨率较低且软组织对比度受限。电磁跟踪通过提供相对于患者解剖结构与术前影像的连续、实时器械定位,弥补了这些影像限制。对于开发 IO 平台的 OEM 而言,EM 跟踪可提供支持以下能力的数据:探针针尖相对 CT 标识靶点的定位;复杂消融手术中多探针的空间协同;以及 CT-超声影像融合以实现联合可视化。随着介入肿瘤学持续转向用于肝脏与肾脏肿瘤的微创经皮路径,连续器械跟踪正成为 IO 系统设计中的基础能力。
NDI Aurora 支持 OEM 开发用于经皮肿瘤消融(RFA、MWA、冷冻消融)、CT-超声影像融合以及多探针消融协同的影像引导系统。Aurora 可用于 OEM 设计的系统中,以支持针对肝脏、肾脏及其他软组织肿瘤的手术流程。
Aurora 可实时跟踪超声探头与患者参考,提供将术前 CT 或 MRI 数据集与实时超声影像进行配准并维持对齐所需的空间数据。这使 OEM 集成的消融与活检工作流能够实现联合可视化,并支持影像引导下的靶向定位。
可以。Aurora 支持同时跟踪多个传感器。将多传感器跟踪纳入系统的 OEM,可据此设计用于多器械协同的工作流;治疗覆盖范围与消融边界的判定由 OEM 系统的预期用途与临床验证来定义。
NDI 根据不同工作流提供多种选择。Planar 20-20 可床旁安装,用于消融与融合过程中的稳定跟踪。Planar 10-11 更加紧凑,可手持用于局部操作。Window 场发生器位于患者下方,适用于与 C 臂兼容的工作流。具体选择取决于 OEM 的系统设计。
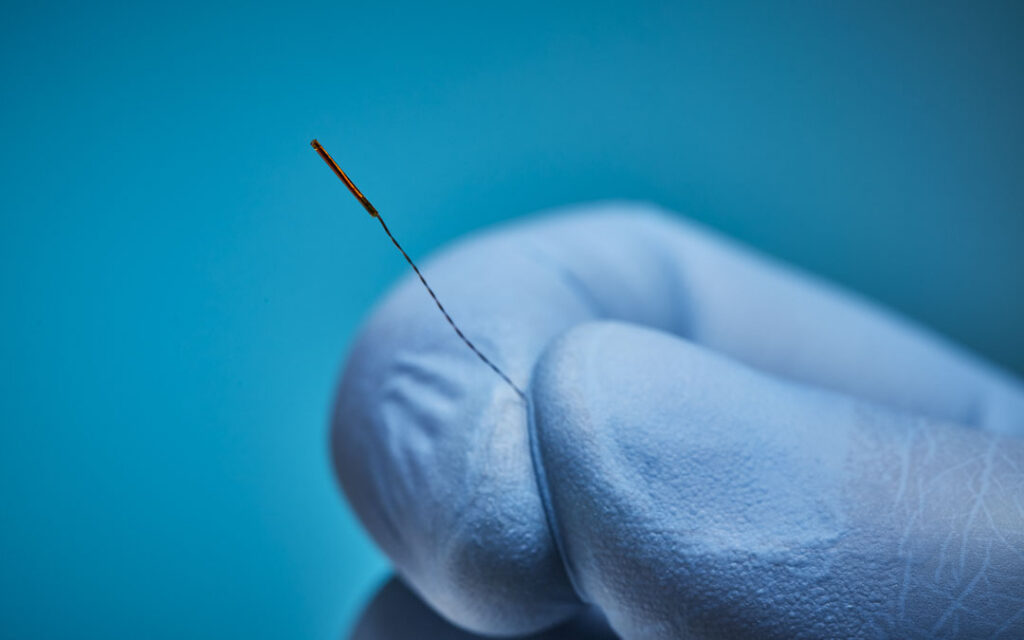
Aurora 支持直径最小可达 0.3 mm 的传感器,便于集成到消融探针、活检针以及对传感器尺寸要求严格的超声换能器中。
通过实时连续跟踪超声探头的位置与姿态,Aurora 提供 OEM 影像平台用于将一系列 2D 超声图像重建为 3D 超声体数据的空间信息。这有助于在 OEM 集成工作流中提升解剖可视化与治疗规划能力。
Aurora 支持 OEM IO 系统用于针对肝脏与肾脏的手术流程设计,这两类器官覆盖了大多数经皮介入肿瘤学手术量。同一跟踪技术也适用于其他在影像引导下进行经皮消融或活检的软组织靶点。